Chapter 2
2.4 Determining Stable Range for Proportional Controller Operations
Consider a closed loop system under Proportional Control in Figure 2‑2:
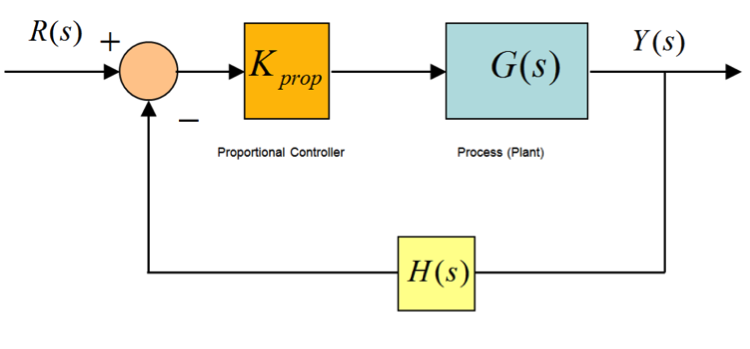
The closed loop transfer function and the system Characteristic Equation are:
| [latex]G_{cl}(s) = \frac{K_{prop}G(s)}{1 +K_{prop}G(s)\cdot H(s)}[/latex]
[latex]1+ K_{prop}G(s)\cdot H(s) = 0[/latex] |
Equation 2‑5 |
The variable parameter – the Proportional Controller Gain – is now a part of the system Characteristic Equation and will feature in the Routh Array. This allows us to define the required condition for a stable, safe, range of Controller operations.
Example
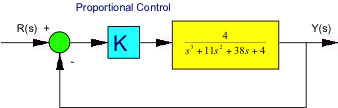
Consider the following control system:
- Is this system open-loop stable?
- Determine a range of gains K required for a stable operation of this closed loop system.
Solution:
Part 1: Open Loop
Open loop characteristic equation is:
[latex]Q(s) = s^{3}+ 11s^{2}+ 38s+ 4 = 0[/latex]
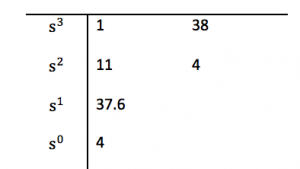
The system is open-loop stable, based on the Routh-Hurwitz Stability Criterion. We can also find numerically (MATLAB), what the poles of the open system are: -5.45 +j2.68, -5.45 – j2.68, -0.11.
The system Open Loop Transfer Function components are:
[latex]G(s)=\frac{4K_{prop}}{s^{3} +11s^{2}+ 38s+ 4}, H(s) = 1[/latex]
Part 2: Closed Loop
The system Closed Loop Transfer Function is:
[latex]G_{cl} = \frac{G(s)}{1 +G(s)H(s)}=\frac{\frac{4K_{prop}}{s^{3}+ 11s^{2}+ 38s +4}}{1 +\frac{4k_{prop}}{s^{3} +11s^{2}+ 38s+ 4}} = \frac{4K_{prop}}{s^{3}+ 11s^{2} +38s +(4K_{prop} +4)}[/latex]
Apply the Routh-Hurwitz criterion to the closed loop characteristic equation:
[latex]s^{3} +11s^{2}+ 38s +(4K_{prop}+ 4) = 0[/latex]
The Necessary Condition is:
[latex]4 +4K_{prop} > 0, K_{prop} >-1[/latex]
The Sufficient Conditions from Routh Array:
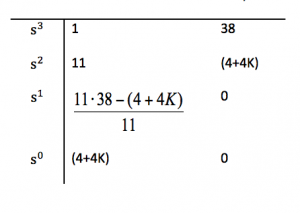
The resulting conditions are:
[latex]\frac{11\cdot 38 - (4+ 4K_{prop})}{11} > 0, 4K_{prop} < 414, K_{prop} < 103.5[/latex]
The total condition is: [latex]-1 < K_{prop} < 103.5[/latex]

Note that the practical range of stable controller operations, as opposed to the previous purely mathematical condition, is [latex]0
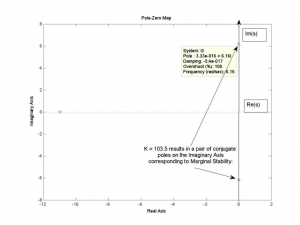
When [latex]K_{prop} = 103.5[/latex] :
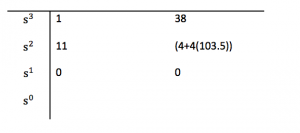
[latex]Q_{aux}(s) = 11s^{2} +418[/latex]
[latex]Q_{aux}(s) = 0[/latex]
[latex]s^{2} +38 = 0[/latex]
[latex]s_{1} = j\sqrt{38} = j6.16[/latex]
[latex]s_{2} = -j\sqrt{38} = -j6.16[/latex]
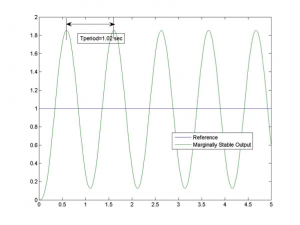
As the pole-zero map illustrates, the location of marginally stable poles on the Imaginary axis corresponds to the frequency of sustained oscillations, \[latex]\omega_{crit} = 6.16 rad/sec[/latex]. This corresponds to the period of oscillations equal to 1.02 seconds. Step response of the system when [latex]K_{prop}=103.5[/latex] is also shown.