
Chapter 4
4.2 Standard Time Inputs
Since there is an infinite number of possible inputs (trajectories) that a control system may have to follow, it is impossible to test all of them. Thus, we do testing with Standard Inputs that are power of time functions as shown in Table 4‑1.
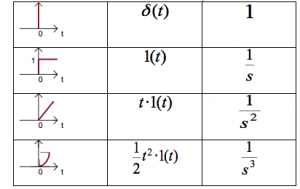
Since we assume that we are dealing with LTI systems, the Principle of Superposition holds:
- Any arbitrary signal can be built using these Standard Power of Time Inputs (“building blocks”);
- The response to a complex input that is a sum of those will be a sum of responses to each of the Standard Inputs;
- As long as the system response to each of the Standard Power of Time Inputs is adequate, the overall response will also be adequate.
We will consider two time frames: Transient, and Steady State, as illustrated in Figure 4‑1. Step input, because of its discontinuity, is a very “harsh” input for a control system to follow and thus is chosen as a standard testing input to check for the quality of a system Transient Response. A higher order of time signals is also required to adequately test for the quality of the system Steady State response.
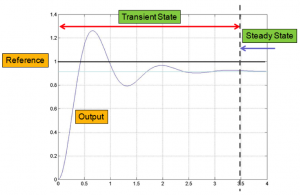
The next section will provide definitions of several “Figures of Merit” to judge the quality of the transient response and the steady state response. They are: Percent Overshoot (PO), Settling Time ([latex]T_{settle}[/latex]), Rise Time ([latex]T_{rise}[/latex])and Steady State Error for a step response in % ([latex]e_{ss(step)}[/latex]). All these Figures of Merit, or “Step Response Specifications”, can be read off the graph of the actual step response, which can be obtained experimentally, or simulated using software.
![]()
HINT: In a test, all the values have to be read off the graph and then the Step Response Specifications have to be calculated. However, when you work on a lab or assignment project, you can use MATLAB to help with that. MATLAB has several functions that can help with that; as well, a very handy m-file called “stepeval.m” was written specifically for this course and can be downloaded from the course Blackboard – see the Lab Folder.
